 The configuration of my quad has changed a lot from my last posts where I wrote about it. The motors and ESCs are still the same, but I upgraded from 8″ to 10″ inch props. This was a good decision, the quad moves a lot better with them. But the EMAX CF2822 seem to be on their limits. The frame is relatively heavy and I also addes some FPV equipment, which doesn’t help in terms of performance. However, the choice was not so bad. They fitted in my limited budget very well and it flies good enough. For my next quad I will allow for a little bit more room in the budget, when I chose the motors.
The configuration of my quad has changed a lot from my last posts where I wrote about it. The motors and ESCs are still the same, but I upgraded from 8″ to 10″ inch props. This was a good decision, the quad moves a lot better with them. But the EMAX CF2822 seem to be on their limits. The frame is relatively heavy and I also addes some FPV equipment, which doesn’t help in terms of performance. However, the choice was not so bad. They fitted in my limited budget very well and it flies good enough. For my next quad I will allow for a little bit more room in the budget, when I chose the motors.
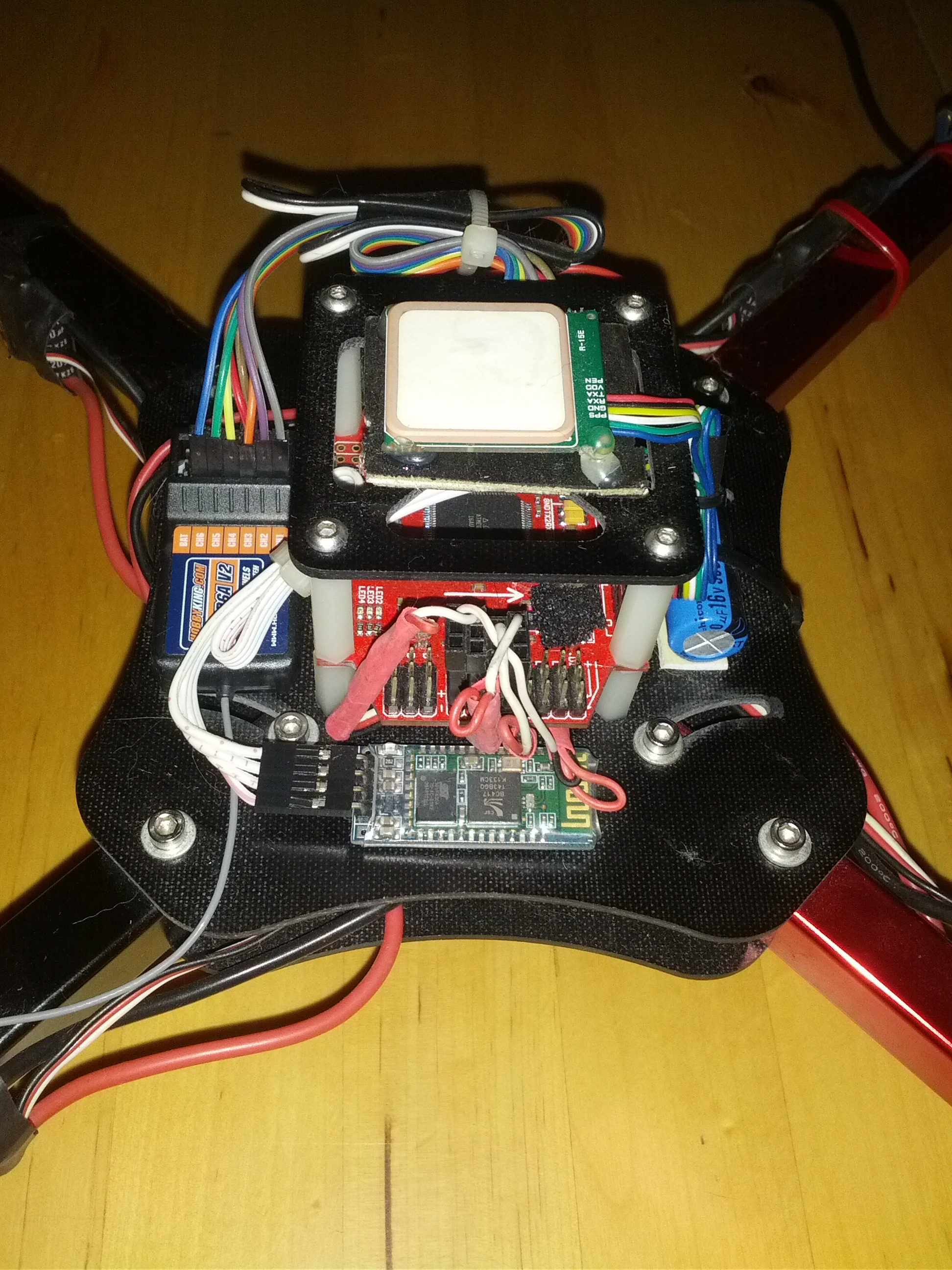
An even more significant change was the replacement of the flight controller. I gave up my experiments with the modded KK board and upgraded to a HK MultiWii Pro board with GPS. It comes with a plethora of sensors compared to what I have used before. Following this thread on Rcgroups I flashed MegaPirateNG on my board, because I wanted to use the ported Arducopter Software which comes with some additional features. Also the Mission Planner which runs on the PC is a great tool. I added to one of its serial Ports a bluetooth module. That way I am able to configure it from the PC wireless and I can also use an excellent tool which runs on my Android Smartphone.
 The new flight controller gave me amazing stability and makes the Quad really easy to fly. I haven’t done any UAV missions yet, where I would program waypoints with my mobile or laptop and let it fly unattended, but all the available data from the GPS turned out to be helpful. Since quite a while I am doing more and more FPV and I have chosen this Quad as my ne FPV platform. The F450 I got is also not bad for FPV, but the X550 due to its FC is a lot more stable and just easier to fly. The data from its sensors can be visualized with an OSD, called MinimOSD-Extra. Home Arrow, height, GPS position etc are displayed and makes the live of the FPV pilot a lot easier – without investing in an expensive OSD unit with extra GPS and sensor. A minimOSD is sold for $18 from Hobbyking.
The new flight controller gave me amazing stability and makes the Quad really easy to fly. I haven’t done any UAV missions yet, where I would program waypoints with my mobile or laptop and let it fly unattended, but all the available data from the GPS turned out to be helpful. Since quite a while I am doing more and more FPV and I have chosen this Quad as my ne FPV platform. The F450 I got is also not bad for FPV, but the X550 due to its FC is a lot more stable and just easier to fly. The data from its sensors can be visualized with an OSD, called MinimOSD-Extra. Home Arrow, height, GPS position etc are displayed and makes the live of the FPV pilot a lot easier – without investing in an expensive OSD unit with extra GPS and sensor. A minimOSD is sold for $18 from Hobbyking.
After playing around a lot with this board, I also found its limitations. The sensors are not the latest, the barometer not so accurate. But what I miss most are the A0 – A5 ports, which are available on the original Arducopter board. For some reasons they are missing on all MultiWii Pro boards and they are used to connect battery voltage, RSSI and current sensor. The flight controller processes this information and can take its own actions on it. And for me more interesting, they also would be available in my OSD. Which are at this stage not.
The $10 more expensive HK PilotMega 2.5 board got them and also better sensor, it would be compatible with Arducopter software. You also need to buy a seperate GPS, which add another $20. For a difference of $30 in my opinon the better choice, at the stage when I purchased my MultiWiiPro it was not available.
Another addition to the board, were some Arduino ultrasonic sensor. They are cheap and they are supported. Not that accurate and only work from 0 to 2m but the quad seems to measure in low height a lot better.
For the future I plan to move my FPV activities to a Quad in either Dead Cat (like TBS Discovery) or H configuration. I dont like the HobbyKing H quad, its too big for my taste. Also the SK450 with Dead Cat conversion gets actually expensive and I am not convinced about the quality of some parts (arms) and the whole design of it. For the flight controller something where I can put on Arducopter would be my first choice. So much to consider at this point… Designing an own frame is fun too, but I can enjoy the quality of good kit.
The FPV virus really got me and I am also diving into OpenLRS 433 Mhz long range stuff. RC is such a great hobby and today its so much technology involved, heaven for me!
Your experience is very similar to mine even down to the X550. I did stick with HK Multiwii 2 Pro board but went with megapirateng and currently run 3.0.1r4 which is a vast improvement from the initial multiwii firmware i had running.
And I also did go with the SK450 with deadcat conversion – I found the quality much better than the X550 even with the plastic arms. It is also easier to mount your components in a neat and tidy way.
Cheers
Alex